আপনি যদি আপনার রান্নাঘরের আকর্ষণীয়তা এবং কার্যকারিতা নাটকীয়ভাবে উত্সাহ দেওয়ার কোনও উপায় সন্ধান করে থাকেন, তবে সেখানে মানুষের প্রচেষ্টা কমাতে বিবেচনা করুন। রান্নাঘরে উপস্থিত একটি ঘরোয়া রোবট তৈরি করে মানুষের প্রচেষ্টা হ্রাস করা যেতে পারে এবং এটি নোংরা পাত্রগুলি ডোবার দিকে নিয়ে সেখানে থামবে। ব্যক্তি যখন রোবট থেকে পাত্রগুলি আনলোড করে তা ফিরে আসবে এবং সেগুলি আরও আনবে। কখনও কখনও বড় রান্নাঘরে, ওয়াশিং সিঙ্কটি ক্যাবিনেটের খুব কাছে না তাই রোবটটি তাকের এক স্থান থেকে অন্য স্থানের দিকে খাবারগুলি নিয়ে যাবে। কালো টেপ ব্যবহার করে শেল্ফে রোবোটের জন্য একটি পাথ তৈরি করা হবে। পথটি সনাক্ত করতে রোবট দুটি ইনফ্রারেড প্রক্সিমিটি সেন্সর ব্যবহার করবে এবং সেন্সরগুলির কাছ থেকে প্রাপ্ত ইনপুটটির উপর ভিত্তি করে, আরডুইনো মোটর চালকদের একটি মোটর চালকের সাহায্যে চলতে পরিচালিত করবে।

ঘরোয়া রোবট
একটি ঘরোয়া রোবট তৈরিতে সমস্ত প্রয়োজনীয় পেরিফেরিয়াল কীভাবে সংযুক্ত করবেন?
এখন, আমাদের প্রয়োজনীয় উপাদানগুলি সংগ্রহ করতে হবে এবং রোবট তৈরি শুরু করতে হবে।
পদক্ষেপ 1: উপাদান ব্যবহৃত
- আরডুইনো আনো
- আইআর সেন্সর (এক্স 5)
- ডিসি মোটরস
- গাড়ী চাকা তাড়া
- কালো টেপ
- জাম্পারের তারগুলি
- ডিসি ব্যাটারি
- আঠালো বন্দুক
- স্ক্রুড্রাইভার সেট
পদক্ষেপ 2: উপাদান অধ্যয়ন
যেহেতু আমরা ইতিমধ্যে উপাদানগুলির একটি তালিকা তৈরি করেছি, আসুন আমরা এক ধাপ এগিয়ে নিয়ে আসি এবং প্রতিটি উপাদানগুলির কাজ সম্পর্কে একটি সংক্ষিপ্ত অধ্যয়ন করি।
দ্য আরডুইনো ইউএনও একটি মাইক্রোকন্ট্রোলার বোর্ড যা একটি মাইক্রোচিপ এটিএমটাগা 328 পি সমন্বিত এবং আরডুইনো.সি.সি দ্বারা বিকাশিত। এই বোর্ডে ডিজিটাল এবং অ্যানালগ ডেটা পিনের একটি সেট রয়েছে যা অন্যান্য সম্প্রসারণ বোর্ড বা সার্কিটের সাথে ইন্টারফেস করা যায়। এই বোর্ডে 14 টি ডিজিটাল পিন, 6 অ্যানালগ পিন রয়েছে এবং একটি টাইপ বি ইউএসবি কেবল দ্বারা আরডুইনো আইডিই (ইন্টিগ্রেটেড ডেভেলপমেন্ট এনভায়রনমেন্ট) এর সাথে প্রোগ্রামযোগ্য। এটি পাওয়ার জন্য 5 ভি প্রয়োজন requires চালু এবং ক সি কোড পরিচালনা করতে.

আরডুইনো ইউএনও
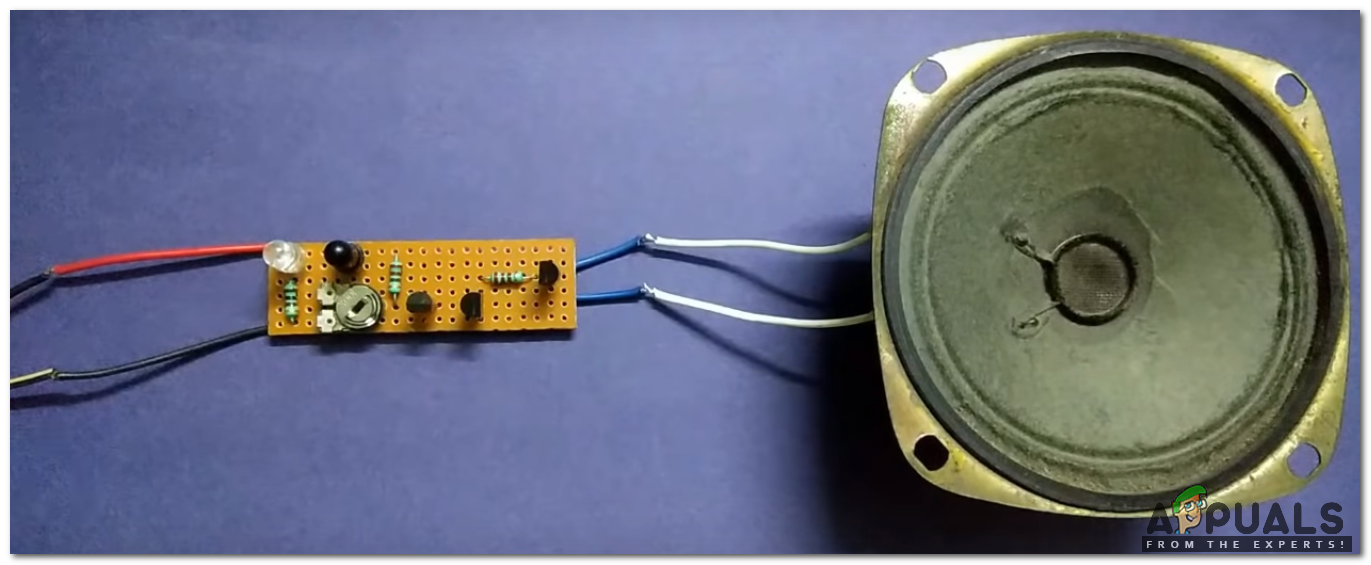
L298N মোটর ড্রাইভারটি ডিসি মোটর পরিচালনা করতে ব্যবহৃত হয়। L298N হ'ল একটি দ্বৈত এইচ-ব্রিজ মোটর চালক যা একই সাথে দুটি ডিসি মোটরের গতি এবং দিকনির্দেশকে অনুমতি দেয়। মডিউলটি ডিসি মোটরগুলিকে চালিত করতে পারে যা ভোল্টেজগুলি 5 এবং 35V এর মধ্যে থাকে, পিক বর্তমান 2 এ পর্যন্ত থাকে। এটি মোটর ভিসি টার্মিনালে ব্যবহৃত ভোল্টেজের উপর নির্ভর করে। আমাদের প্রকল্পে, 5V পিনটি ইনপুট হিসাবে ব্যবহৃত হবে কারণ আইসির সঠিকভাবে কাজ করার জন্য আমাদের এটি একটি 5 ভি পাওয়ার সাপ্লাইয়ের সাথে সংযুক্ত করতে হবে। ডিসি মোটরগুলির সাথে L298N মোটর চালকের সার্কিট ডায়াগ্রাম L298N মোটর চালকের প্রক্রিয়া বোঝার জন্য নীচে দেখানো হয়েছে। বিক্ষোভের জন্য, ইনপুটটি দেওয়া হয় লজিক স্টেট পরিবর্তে আইআর সেন্সর।

সার্কিট ডায়াগ্রাম প্রোটিয়াস 8 পেশাদার উপর তৈরি
পদক্ষেপ 3: ব্লক ডায়াগ্রাম এবং কার্যনির্বাহী বোঝা
প্রথমত, আমরা ব্লক ডায়াগ্রামের মধ্য দিয়ে যাব, কার্য নীতিটি বুঝব এবং তারপরে হার্ডওয়্যার উপাদানগুলি একত্রিত করার দিকে এগিয়ে যাব।

ব্লক ডায়াগ্রাম
আমরা যে সেন্সরগুলি ব্যবহার করব তা ডিজিটাল এবং তারা 0 বা 1 আউটপুট দিতে পারে These এই সেন্সরগুলি আমরা কিনেছি giving ঘ সাদা পৃষ্ঠতল এবং 0 কালো পৃষ্ঠতল। আমরা যে সেন্সরগুলি ক্রয় করি তা এলোমেলো মান দেয়, কখনও কখনও তারা দেয় 0 সাদা পৃষ্ঠতল এবং ঘ কালো পৃষ্ঠতল। আমরা এই রোবোটটিতে পাঁচটি সেন্সর ব্যবহার করব পাঁচটি সেন্সরের কোডে চারটি শর্ত রয়েছে।
- লাইনে ফরওয়ার্ড করুন: মাঝারি সেন্সরটি যখন কালো পৃষ্ঠে থাকবে এবং বাকী সেন্সরগুলি সাদা পৃষ্ঠে থাকবে, তখন সামনের অবস্থাটি কার্যকর হবে এবং রোবটটি সরাসরি এগিয়ে যাবে। আমরা যদি থেকে শুরু সেন্সর 1 এবং অবধি এগিয়ে যান সেন্সর 5, প্রতিটি সেন্সর যথাক্রমে প্রদান করবে মান (1 1 0 1 1) ।
- তীক্ষ্ণ ডানদিকে ঘুরুন: যখন সেন্সর ঘ এবং সেন্সর 2 সাদা পৃষ্ঠের উপর রয়েছে এবং বাকী সেন্সরগুলি কালো পৃষ্ঠের উপরে রয়েছে, ডানদিকে ঘোরার তীক্ষ্ণ শর্তটি কার্যকর হবে এবং রোবটটি ডানদিকে তীক্ষ্ণ পরিণত হবে। আমরা যদি থেকে শুরু সেন্সর 1 এবং অবধি এগিয়ে যান সেন্সর 5, প্রতিটি সেন্সর যথাক্রমে প্রদান করবে মান (1 1 0 0 0)।
- তীক্ষ্ণ বাম পালা: যখন সেন্সর 4 এবং সেন্সর 5 সাদা পৃষ্ঠে রয়েছে এবং বাকী সেন্সরগুলি কালো পৃষ্ঠের উপরে রয়েছে, বাম দিকের তীক্ষ্ণ শর্তটি কার্যকর হবে এবং রোবটটি তীক্ষ্ণ বামে পরিণত হবে। আমরা যদি থেকে শুরু সেন্সর 1 এবং অবধি এগিয়ে যান সেন্সর 5, প্রতিটি সেন্সর যথাক্রমে প্রদান করবে মান (0 0 0 1 1) ।
- থাম: পাঁচটি সেন্সরের সমস্তই যখন কালো পৃষ্ঠের উপরে থাকবে তখন রোবটটি থামবে এবং মোটরগুলি চালু হবে বন্ধ। পাঁচটি কালো পৃষ্ঠের সাথে এই পয়েন্টটি সিঙ্কের কাছাকাছি থাকবে যাতে ডিশ ওয়াশার ধোয়া দেওয়ার জন্য রোবট থেকে প্লেটগুলি নামাতে পারে।
আমরা কালো টেপ ব্যবহার করে রান্নাঘরের তাকের উপর একটি পাথ তৈরি করব এবং সেই পথটি সিঙ্কের কাছেই শেষ হবে, সুতরাং রোবট সিঙ্কের কাছে থামবে এবং ডিশ ওয়াশার প্লেটগুলি আনবে এবং তারপরে রোবট পথটির দিকে অগ্রসর হবে এবং পাত্রগুলি সন্ধান করবে আবার।

ট্র্যাক অফ রোবট
পদক্ষেপ 4: আরডুইনো দিয়ে শুরু করা
আপনি যদি আরডুইনো আইডিইর সাথে আগে পরিচিত না হন তবে চিন্তা করবেন না কারণ নীচে আপনি আরডুইনো আইডিই ব্যবহার করে মাইক্রোকন্ট্রোলার বোর্ডে কোড বার্ন করার পরিষ্কার পদক্ষেপ দেখতে পাচ্ছেন। আপনি আরডুইনো আইডিইর সর্বশেষতম সংস্করণটি ডাউনলোড করতে পারেন এখানে এবং নীচের পদক্ষেপগুলি অনুসরণ করুন:
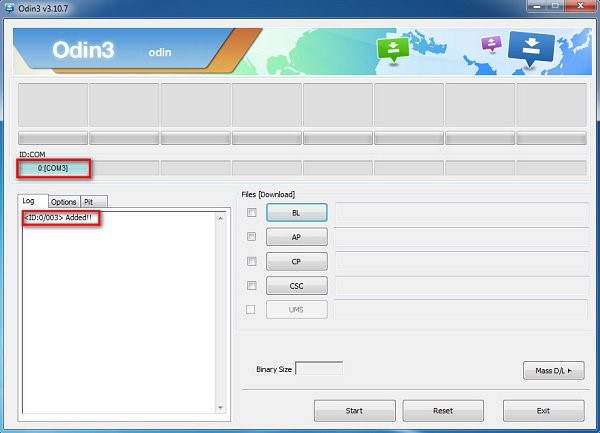
- যখন আরডুইনো বোর্ড আপনার পিসিতে সংযুক্ত থাকে, তখন 'কন্ট্রোল প্যানেল' খুলুন এবং 'হার্ডওয়্যার এবং সাউন্ড' এ ক্লিক করুন। তারপরে 'ডিভাইস এবং মুদ্রকগুলি' এ ক্লিক করুন। আপনার আরডুইনো বোর্ডটি যে পোর্টটির সাথে সংযুক্ত রয়েছে তার নাম সন্ধান করুন। আমার ক্ষেত্রে এটি 'COM14' তবে এটি আপনার পিসিতে আলাদা হতে পারে।

বন্দর সন্ধান করা
- এবার আরডুইনো আইডিই খুলুন। সরঞ্জামগুলি থেকে, আরডুইনো বোর্ড এতে সেট করুন আরডুইনো / জেনুইনো ইউএনও।

বোর্ড নির্ধারণ
- একই সরঞ্জাম মেনু থেকে, কন্ট্রোল প্যানেলে আপনি যে পোর্ট নম্বরটি দেখেছেন সেট করুন।

পোর্ট স্থাপন করা
- নীচে সংযুক্ত কোডটি ডাউনলোড করুন এবং এটি আপনার আইডিইতে অনুলিপি করুন। কোডটি আপলোড করতে, আপলোড বাটনে ক্লিক করুন।



আপনি কোডটি ডাউনলোড করতে পারেন এখানে
পদক্ষেপ 5: কোড বোঝা
কোডটি খুব সহজ। এটি নীচে সংক্ষেপে ব্যাখ্যা করা হয়েছে:
- কোডের শুরুতে সেন্সর পিনগুলি আরম্ভ করা হয় এবং এর সাথে মোটর ড্রাইভার L298N এর জন্য পিনগুলিও শুরু করা হয়।
int সক্ষম 1 পিন = 10; // মোটর 1 ইন মোট 1 পিন 1 = 2 এর জন্য অ্যানালগ ইনপুট জন্য পিডব্লিউএম পিন শুরু করা; // মোটর 1 ইন মোট 1 পিন 2 = 3 এর জন্য ইতিবাচক পিন শুরু করা; // মোটর 1 ইন্ট সক্ষম 2 পিনের জন্য নেতিবাচক পিন শুরু করা = 11; // মোটর 2 ইন্টি মোটর 2 পিন 1 = 4 এর জন্য অ্যানালগ ইনপুট জন্য পিডব্লিউএম পিন শুরু করা; // মোটর 2 ইন্টি মোটর 2 পিন 2 = 5 এর জন্য ইতিবাচক পিন শুরু করা; // মোটর 2 ইন্ট এস 1 = 12 এর জন্য নেতিবাচক পিন শুরু করা; // সেন্সর 1 ইন্ট এস 2 = 9 এর জন্য পিন 12 শুরু করা; // সেন্সর 2 ইন্ট এস 3 = 8 এর জন্য পিন 9 সূচনা করা; // সেন্সর 3 ইন এস 4 = 7 এর জন্য পিন 8 প্রারম্ভিককরণ; // সেন্সর 4 ইন এস 5 = 6 এর জন্য পিন 7 সূচনা করা; // সেন্সর 5 এর জন্য পিন 6 শুরু করা
- অকার্যকর সেটআপ() পিনগুলি INPUT বা OUTPUT হিসাবে সেট করতে ব্যবহৃত একটি ফাংশন। এটি আরডুইনোর বাউড রেটও নির্ধারণ করে। বাউড হার হ'ল মাইক্রোকন্ট্রোলার বোর্ড সংযুক্ত অন্যান্য উপাদানগুলির সাথে যোগাযোগ করে speed
{পিনমোড (সক্ষম 1 পিন, আউটপুট); // মোটর 1 পিনমডের জন্য PWM সক্ষম করা (সক্ষম 2 পিন, OUTPUT); // মোটর 2 পিনমডের জন্য পিডাব্লুএমএম সক্ষম করা (মোটর 1 পিন 1, আউটপুট); // মোটর 1 পিন 1 আউটপুট পিনমোড হিসাবে সেট করা (মোটর 1 পিন 2, আউটপুট); // মোটর 1 পিন 2 কে আউটপুট পিনমোড হিসাবে সেট করা হচ্ছে (মোটর 2 পিন 1, আউটপুট); // মোটর 2 পিন 1 আউটপুট পিনমোড হিসাবে সেট করা (মোটর 2 পিন 2, আউটপুট); // মোটর 2 পিন 2 কে আউটপুট পিনমোড হিসাবে সেট করা হচ্ছে (এস 1, ইনপুট); // সেন্সর 1 কে ইনপুট পিনমোড হিসাবে সেট করা হচ্ছে (এস 2, ইনপুট); // ইনপুট পিনমড (এস 3, ইনপুট) হিসাবে সেন্সর 2 সেট করা; // ইনপুট পিনমড (এস 4, ইনপুট) হিসাবে সেন্সর 3 সেট করা; // ইনপুট পিনমড (এস 5, ইনপুট) হিসাবে সেন্সর 4 সেট করা; // ইনপুট হিসাবে সেন্সর 5 সেট করা হচ্ছে সিরিয়াল.বেগিন (9600); // বাউড রেট নির্ধারণ} - অকার্যকর লুপ () এমন একটি ফাংশন যা বারবার চক্রের মধ্যে চলে। এই লুপটিতে, আমরা আরডুইনো ইউএনওকে নির্দেশ দিই যে কোন কাজগুলি পরিচালনা করা উচিত। মোটরগুলির পূর্ণ গতি 255 এবং উভয় মোটরেরই গতি আলাদা। সুতরাং, আমরা যদি রোবটকে এগিয়ে নিতে চাই তবে ডানদিকে ঘুরুন আমাদের মোটরগুলির গতি সামঞ্জস্য করতে হবে। আমরা কোডে অ্যানালগ পিন ব্যবহার করেছি কারণ আমরা দুটি শর্তের গতি বিভিন্ন অবস্থাতে আলাদা করতে চাই। আপনি আপনার নিজের মোটরের গতি সামঞ্জস্য করতে পারেন।
অকার্যকর লুপ () {যদি (! (ডিজিটাল রিড (এস 1)) &&! (ডিজিটালারি (এস 2)) এবং& (ডিজিটাল রিড (এস 3)) এবং&! (ডিজিটাল রিড (এস 4)) // এবং এগিয়ে! লাইনটি {এনালগ রাইট (সক্ষম 1 পিন, 61); // মোটর 1 গতি অ্যানালগ রাইট (সক্ষম 2 পিন, 63); // মোটর 2 গতির ডিজিটাল লিখন (মোটর 1 পিন 1, উচ্চ); // মোটর 1 পিন 1 উচ্চ ডিজিটাল রাইটে সেট করুন (মোটর 1 পিন 2, কম); // মোটর 1 পিন 2 কম ডিজিটাল রাইটে সেট করুন (মোটর 2 পিন 1, উচ্চ); // মোটর 2 পিন 1 উচ্চ ডিজিটাল রাইটে সেট করুন (মোটর 2 পিন 2, কম); // মোটর 2 পিন 2 সেট কম করুন} যদি (! (ডিজিটাল রিড (এস 1)) &&! (ডিজিটালারি (এস 2)) এবং& (ডিজিটাল রিড (এস 3)) এবং& (ডিজিটাল রিড (এস 4)) এবং& (ডিজিটাল রিড (এস 5)) / / শার্প ডানদিকে ঘুরুন {এনালগ রাইট (সক্ষম 1 পিন, 60); // মোটর 1 গতি অ্যানালগ রাইট (সক্ষম 2 পিন, 80); // মোটর 2 গতির ডিজিটাল রাইট (মোটর 1 পিন 1, উচ্চ); // মোটর 1 পিন 1 উচ্চ ডিজিটাল রাইটে সেট করুন (মোটর 1 পিন 2, কম); // মোটর 1 পিন 2 কম ডিজিটাল রাইটে সেট করুন (মোটর 2 পিন 1, কম); // মোটর 2 পিন 1 নিম্ন ডিজিটাল রাইটে সেট করুন (মোটর 2 পিন 2, কম); // মোটর 2 পিন 2 সেট কম করুন} যদি ((ডিজিটালরিড (এস 1)) && (ডিজিটালারি (এস 2)) এবং& (ডিজিটাল রিড (এস 3)) এবং&! (ডিজিটাল রিড (এস 4)) /! (ডিজিটাল রিড (এস 5)) / / শার্প বাম দিকে ঘুরুন {এনালগ রাইট (সক্ষম 1 পিন, 80); // মোটর 1 স্পিড অ্যানালগ রাইট (সক্ষম 2 পিন, 65); // মোটর 2 গতির ডিজিটাল রাইট (মোটর 1 পিন 1, কম); // মোটর 1 পিন 1 নিম্ন ডিজিটাল রাইটে সেট করুন (মোটর 1 পিন 2, কম); // মোটর 1 পিন 2 কম ডিজিটাল রাইটে সেট করুন (মোটর 2 পিন 1, উচ্চ); // মোটর 2 পিন 1 উচ্চ ডিজিটাল রাইটে সেট করুন (মোটর 2 পিন 2, কম); // মোটর 2 পিন 2 সেট কম করুন} যদি ((ডিজিটালিরড (এস 1)) && (ডিজিটালারি (এস 2)) এবং& (ডিজিটাল রিড (এস 3)) এবং& (ডিজিটাল রিড (এস 4)) এবং& (ডিজিটালারি (এস 5)) // স্টপ {এনালগ রাইট (সক্ষম 1 পিন, 0); // মোটর 1 স্পিড অ্যানালগ রাইট (সক্ষম 2 পিন, 0); // মোটর 2 গতির ডিজিটাল রাইট (মোটর 1 পিন 1, কম); // মোটর 1 পিন 1 নিম্ন ডিজিটাল রাইটে সেট করুন (মোটর 1 পিন 2, কম); // মোটর 1 পিন 2 কম ডিজিটাল রাইটে সেট করুন (মোটর 2 পিন 1, কম); // মোটর 2 পিন 1 নিম্ন ডিজিটাল রাইটে সেট করুন (মোটর 2 পিন 2, কম); // মোটর 2 পিন 2 সেট কম} to
অ্যাপ্লিকেশন
- শিল্প অ্যাপ্লিকেশন : এই রোবটগুলি traditionalতিহ্যবাহী পরিবাহক বেল্টগুলি প্রতিস্থাপন করে শিল্পগুলিতে স্বয়ংক্রিয় সরঞ্জামবাহক হিসাবে ব্যবহৃত হতে পারে।
- ঘরোয়া প্রয়োগ : এগুলি ঘরে মেঝে পরিষ্কার, রান্নাঘরের কাজ ইত্যাদির জন্যও বাড়িতে ব্যবহার করা যেতে পারে
- গাইডেন্স অ্যাপ্লিকেশন : এই রোবটগুলি পাবলিক প্লেস যেমন শপিংমল, ফুড কোর্ট, জাদুঘর ইত্যাদিতে পথ নির্দেশিকা সরবরাহ করতে ব্যবহার করা যেতে পারে






![[ফিক্স] কড মেগাওয়াট দেব ত্রুটি 5761 (অপরিবর্তনযোগ্য ত্রুটি)](https://jf-balio.pt/img/how-tos/56/cod-mw-dev-error-5761.png)